
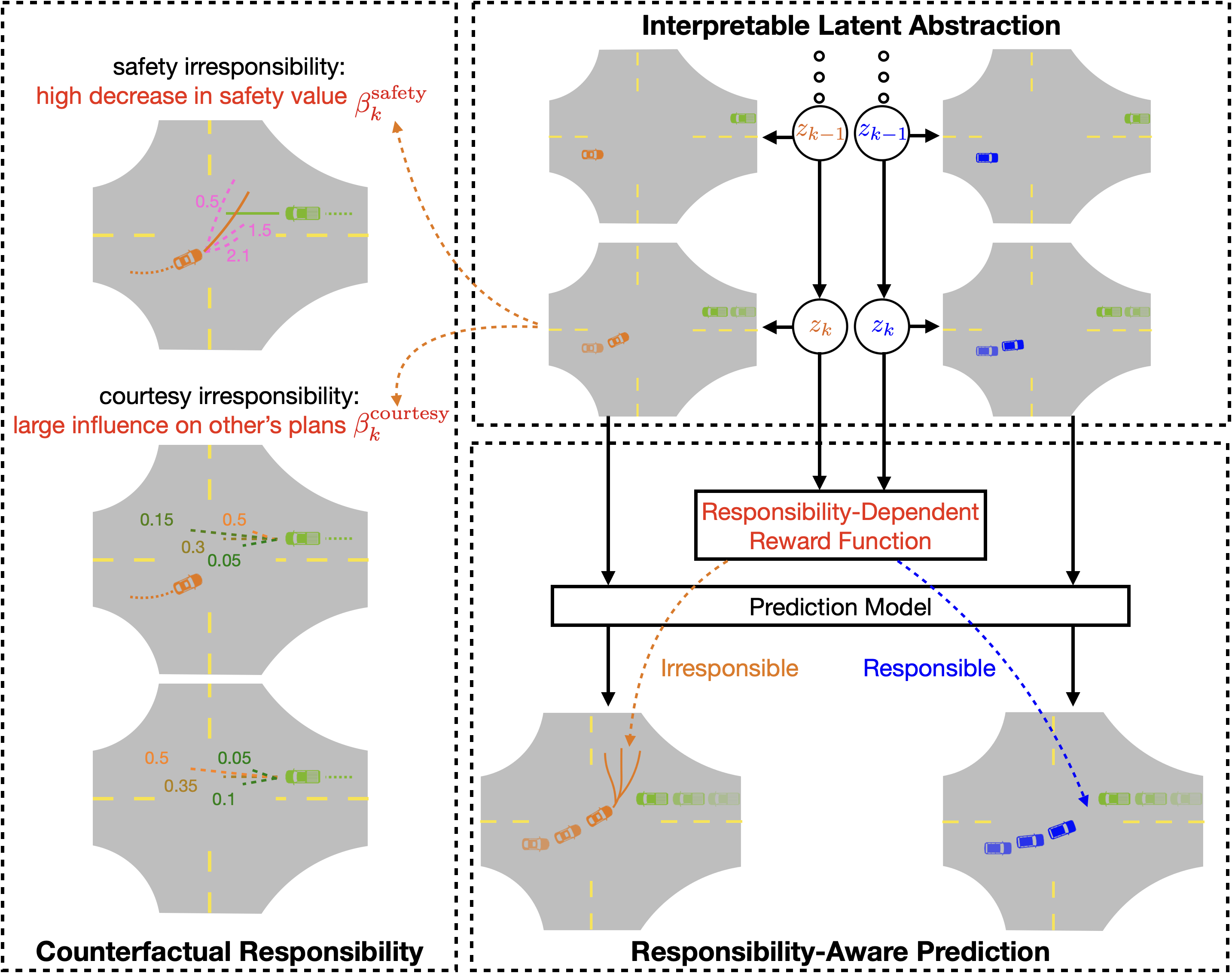
Interpretable Trajectory Prediction for Autonomous Vehicles via Counterfactual Responsibility
Published in IROS, 2023
Recommended citation:
@inproceedings{hsu2023responsibility,
title={Interpretable Trajectory Prediction for Autonomous Vehicles viaCounterfactual Responsibility},
author={Hsu, Kai-Chieh and Leung, Karen and Chen, Yuxiao and Fisac, Jaime Fern\`andez and Pavone, Marco},
booktitle={IEEE/RSJ Int.\ Conf.\ on Intelligent Robots \& Systems},
year={2023},
}