
ISAACS: Iterative Soft Adversarial Actor Critic for Safety
Published in L4DC, 2023
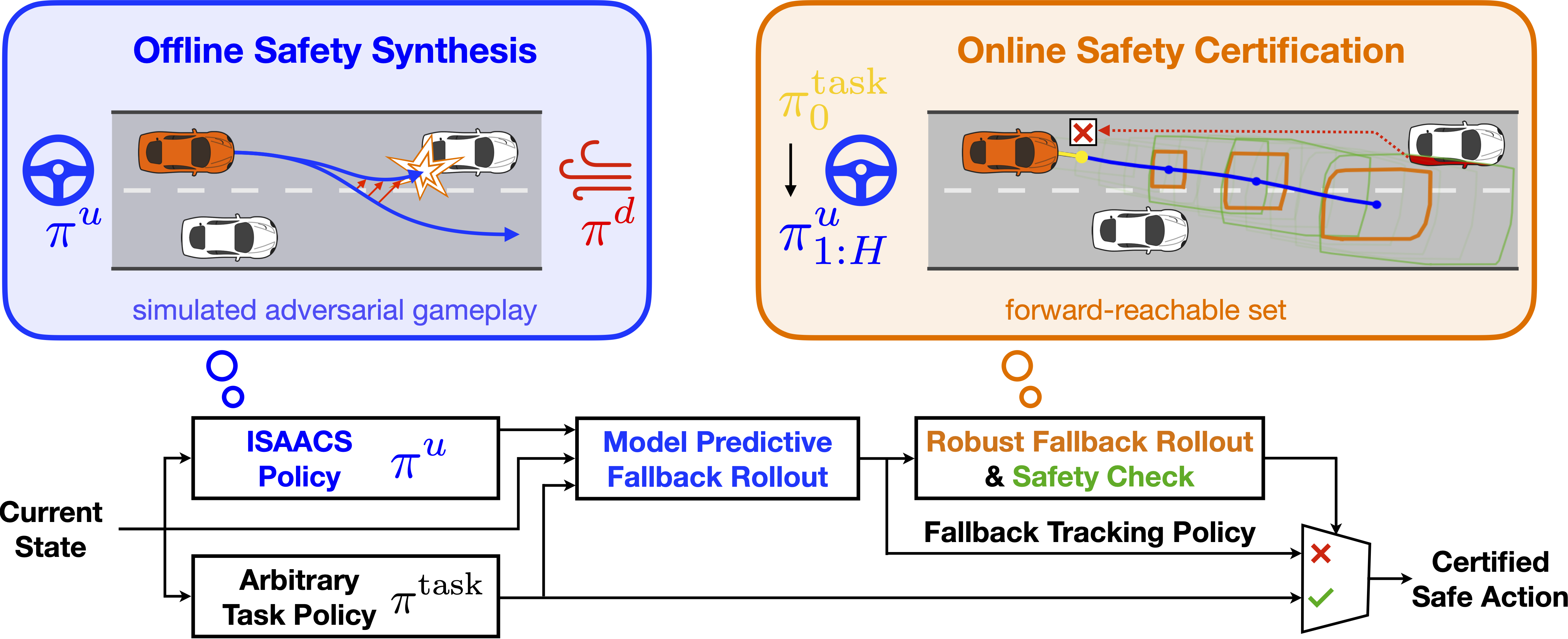
ISAACS (Iterative Soft Adversarial Actor-Critic for Safety) is a new game-theoretic reinforcement learning scheme for approximate safety analysis, whose simulation-trained control policies can be efficiently converted at runtime into robust safety-certified control strategies, allowing robots to plan and operate with safety guarantees in the physical world.
Recommended citation:
@inproceedings{hsunguyen2023isaacs,
title={ISAACS: Iterative Soft Adversarial Actor-Critic for Safety},
author={Hsu, Kai-Chieh and Nguyen, Duy Phuong and Fisac, Jaime Fern\`andez},
booktitle={Proceedings of the 5th Annual Learning for Dynamics and Control Conference},
page={90—103}
year={2023},
editor={Matni, Nikolai and Morari, Manfred and Pappas, George J.},
volume={211},
series={Proceedings of Machine Learning Research},
month={15--16 Jun},
publisher={PMLR},
url={https://proceedings.mlr.press/v211/hsu23a.html}
}